Scurrie is Born for Motorama 2007
Scurrie was our second robot. It was an undercutter that was designed entirely in solidworks before
we tried to build it. We were trying to build it with very limited tools, parts we already had,
and a very small budget. I say "we" because this was a joint venture between Sarah and I... sorta.
We split the initial designed cost - $300 apiece - and I showed her how to use
eMachineShop and
Solidworks, both of which were used to come up with the design.
She also hung around for some of the early build sessions
but unfortunately it was bitterly cold in the garage I was using as a shop and she didn't have a lot of interest
in the actual build parts.
I toyed with a whole bunch of ideas for things I could build, but eventually settled on a friction drive undercutter
design. I liked the friction drive in my 30 pounder and thought I could make it work in a 12. I planned to use
the brushed HTI motors for the weapon power because they were really really cheap. I guess you get what
you pay for.
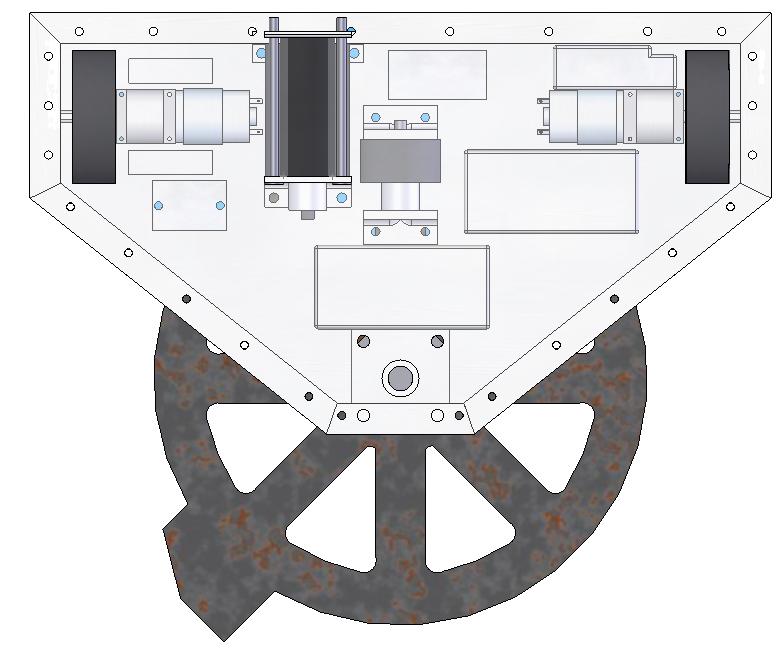
Here is the original cad layout for the bot. I was planning to use the BaneBots 28mm RS385 motors and gearboxes
powering 3" wheels on around 7.2 volts. In this cad you can see two 12-cell packs (each 14.4v) but they never
would have fit weight or space requirements. I ended up splitting one of them in half and powering the drive off
of it separately.
I planned to use aluminum channel around the entire bot to give it an air gap margin and to make it so
I didn't have to tap any holes. At this point I still hadn't learned that there are multiple kinds of taps,
and the only ones I had were bottoming taps - not the easiest to use on their own!.
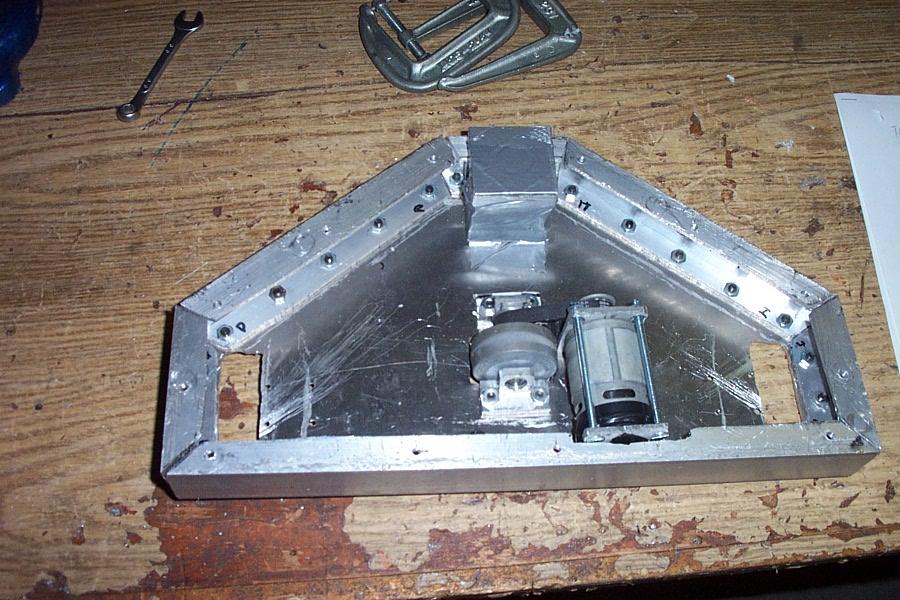
Here is a picture of the actual frame with the weapon motor installed. I was able to slightly improve
the reliability of the motors in the 30 pounder by making clamp-type mounts like this so I started right
off the bat with them in Scurrie.
I was planning to use an Astroflight 50A forward-only speed controller for the weapon but during testing it smoked.
That happened about 4 days before the event (which, of course, was the earliest I had the bot wired up...) At that
point I was at a total loss. I didn't have a spare controller that would run it and I didn't have time to
ship a new one to the house. I spent a couple hours wrestling with it and worrying about not being able to compete
with the new bot after spending so much time on it. I eventually decided it might be possible to get a whyachi
contactor in the bot.
After a quick weight check to see if it was even possible, I spent a few hours rewiring the bot and installing
a 9v booster-battery on the weapon switch line because the contactor would only fire at 24v, 14.4 wasn't enough.
I did finally make weight and the bot spun up like it was supposed to. It was definitely a hack but with
only a couple of days left to pack it was worth it. Crisis averted!
Check out how the bot did at Motorama 2007.