Tripolar Build for Franklin Institute 2007
Going Brushless!
We had really been fighting with the stupid weapon motors since the beginning. Early on I didn't even know
enough to solve the small problems, let alone identify the weapon motors as a big issue. We brought two bots
to Motorama 2007 because the Astros had gone through all of POP 06 without burning up so we figured we had
solved the problem. Not so - in fact we lost another $350 worth at Motorama this year. It was time to find a
better solution.
The problem was I only had about 2.75" of internal height, and I needed to squeeze somewhere around 2 horsepower
out of the 24 ounces I had for weapon motors. I could probably go as high as 30 ounces, but that's not much.
I tried long and hard to find a way to jam an EV Warrior or mini magmotor in the bot, but that 3" height just wasn't
letting it happen even if I could find the weight somewhere.
I had been talking to other builders about these new brushless outrunner motors. I generally had only seen them run in small
bots with small weapons, and there was a lot of talk about "cogging" or motors failing to start because they have
very little torque until they get going. The 58% efficiency of the astros was pathetic compared to the 85%+ that the
brushless motors were boasting though, and they were light and small enough to fit.
I was originally looking at a pair of astro-sized motors set up as direct replacements, but then stepped outside
the box and thought about a single, bigger motor. The biggest one I could fit was an AXI 5330, with a 2.5 x 2.5" footprint.
I played with layouts and eventually got something I liked. I laid down the cash for the package deal of motor and
recommended speed controller (a total of over $500!). This sounds painful, but I had burned that much up in motors in less
than a year already, if these could do it, it was worth a shot.
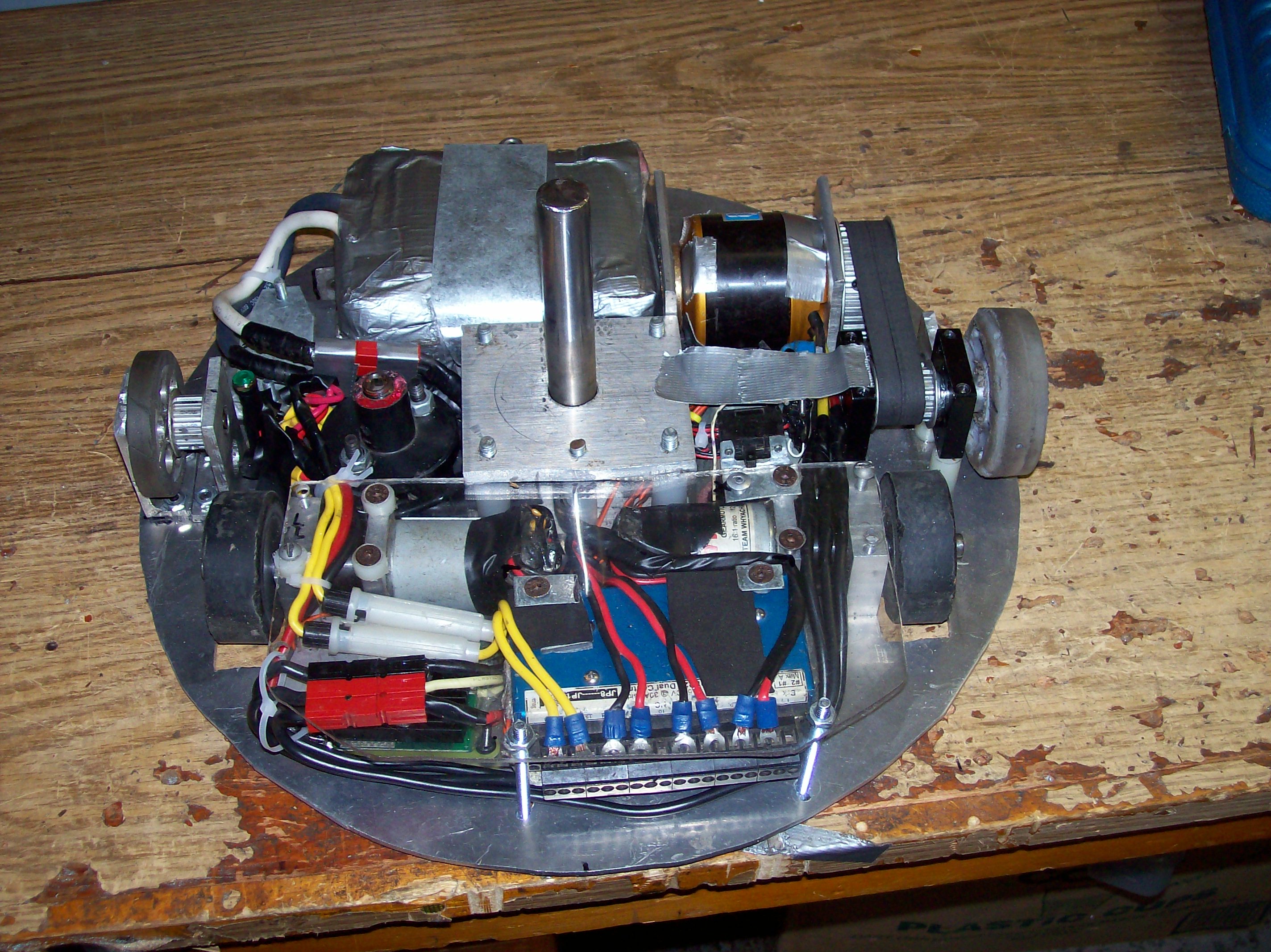
Here is a shot of the assembled base plate. The drive motors ended up crooked because I drilled all the holes
by hand and the bit walked when I did the left motor. It didn't end up causing too many issues. You can see that
I actually carried over the roller wheel from the old bot on the left side of the picture to offset the powered
weapon roller and the new motor. The wheel itself is from an old version of the astro base, with a new hub to
fit the 3/8" keyed shaft. The keyed weapon shaft was a big upgrade over the set screws I used to use.
You can also see that I made a clamp-type mount that supports the back of the weapon motor. I just didn't trust
the 8 tiny screws all the way out on the face of the motor to support it when I smacked somebody and hit the wall.
The back of the motor has a nub that is just under 1" OD, so a 1" bushing works as a great rear support. I've
seen a couple of other people use these motors in 30 pounders now and the primary failure modes are loose magnets
and broken face screws. I added some 20 minute epoxy to hold the magnets in and the rear support took care of the
screws. I am still using this motor today (almost 5 years later) and that is a long time in robot fighting.
Another improvement for this bot was the wiring harness. I actually put some effort into keeping the wires organized
and tied down. The weapon controller is on the lower-left corner of the picture and you can see the weapon motor wires
go all the way around the front of the bot and over the drive motor before connecting to the weapon motor. I carefully
clamped it all down with a sheet of lexan (later replaced with UHMW - a much better material IMHO). This method of running
the wires allowed me easy access to the connectors so I could flip them around to make the motor run backwards.
You can just barely see in the top-left corner of the image that I actually made a wiring strap to hold down the receiver
battery (yes, I was still using one...) and to tie down the battery wires. This was an improvement over the old versions
of the bot where I mostly just "hoped" the wires stayed put.
Way back then I was still doing impact testing in an open area. It was dumb, but it was good to know whether
the bot would blow itself apart. We did a short test of the bot against some old frames and targets and
I was very impressed by the spinup time and coolness of all of the components. We were very optimistic for
the competition. Check out how it did at The Franklin Institute 2007.