Tripolar Build for Motorama 2006
For Motorama I had a few issues I was hoping to resolve that had been uncovered at PoP 9.
- The drive system absolutely sucked. I couldn't keep the drive motor pinions on.
- The weapon motors didn't hold up. Two suffered magnet failure and another burned up when the mount came loose.
- The bot was really close to the weight limit
To resolve these I drafted a new design that had different drive motors and improved weapon motor mounts. I decided to
switch to Harbor Freight drill motors and gearboxes for the drive system. These were MUCH cheaper than the
tboxes, but not supposed to be as sturdy. The thing with the tboxes was that while the box itself and gears were super
sturdy, the pinion gear attached with a simple set screw and it wasn't up to the task. The drill motors had been widely
used in 30 pounders for some time so I wanted to give them a shot. The new drive motor and wheel assemblies were
about a pound lighter than the tboxes and aluminum wheels. This allowed me to make better mounts for the weapon motors
and beef up the shaft holder without welding.
My first thought was "what else can I spend the extra pound on?" and I decided to see if I could make a 4WD setup.
I determined that it would be too complex and heavy to actually make functional, but the drawing was fun to make.
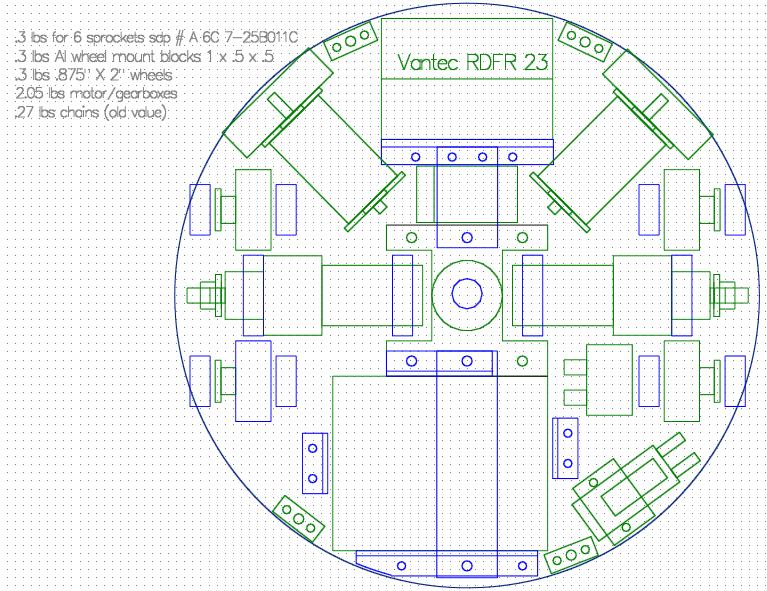
After settling on a simple two wheel drive setup I made a solidworks drawing of the entire baseplate according to the layout
This was my first real venture into SolidWorks land, having only learned about 2D CAD in the last year or so. The license
I had for Solidworks was probably the last of the RFL / Solidworks sponsorship pieces. Once I figured it out, the software
was pretty nice to use. The put a lot of thought into guessing what you wanted to do from each point in the assembly process
and provided you with the tools to do what you need while assembling. I now use
Alibre because my solidworks license has expired. Alibre is a less-polished, more-buggy package, but it is also really cheap
and runs a little faster on my crappy hardware at home. Of course, I have Alibre 11 which is several years newer than SW 2004
so the new SW probably runs better. On good hardware, I'd use solidworks if I could afford it.
The solidworks layout went pretty well and you can see that I switched from the (now busted) Thor Spin Controller to a
Whyachi C1 Contactor. This was big enough to never burn
up under load and physically robust enough to be mounted securely. Naturally the motors became the weak link in the system
but at least I removed one more expensive piece from the high-power circuit.

In an effort to protect the expensive and fragile (but powerful!) weapon motors, I devised new clamp-type mounts. The thinking
behind the clamp mounts was that the shock loading from the bot hitting things was getting transferred through the shaft, then
through the magnets, then into the mount, and finally into the baseplate. I wanted to make mounts that would convert the shock
load from the shaft directly into the baseplate without first going through the magnets. In addition, I was hoping to reinforce
both the brush holders and the tiny brass screws holding the ends of the motor together. I was very happy with how these turned
out, despite requiring the only 10-24 screws in the entire bot because I couldn't find 3" long 10-32 ones. Notice in the image
that I cut slices of mouse pad to support the motor mounts, with the idea being the entire thing should be shock-isolated.

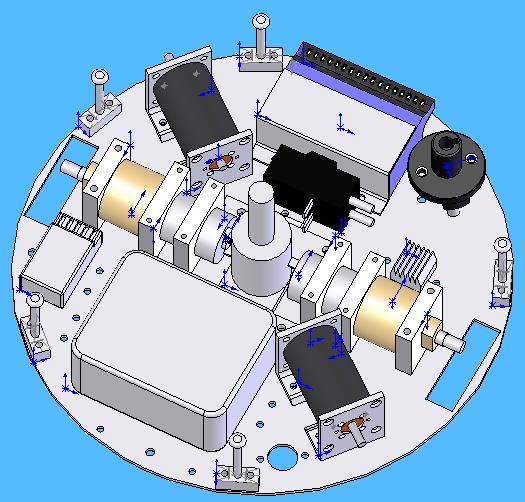
I laid the base out and started running wires. After I got the drive controller mounted in the new, significantly
stronger and less weld-afied mount, the wiring turned out ok. In this picture you can see holes where the weapon motors will
go. I even had plugs set up so I could hot-swap them in case of failure. That was an improvement over the last version where
they were sorta stuck in the bot. After disassembling and repairing three of them at the last competition I thought that
modularity was important. I also vastly improved the cleanliness of the wiring so that it was much easier to follow.
I was especially happy with the wiring for the controller because it was tied down to the controller itself without putting
any pressure on the screw down terminals.


Here you see the bot ready to rock, and the test target I used to make sure it was working. The drive motors were
more torquey than the old bot ever was and since they were slower the wheels got better traction. The ground clearance was
a little higher too, making the bot drive like it never had before. Though they were cheap in more than once sense, the motors
were still an improvement over my implementation of the tboxes. The new shaft mount and lack of welding to the base plate
made everything line up pretty well and the wiring was better. Overall I was very happy with this build. Check out the
Motorama 2006 event report to see how it did.